CatchGlowworm
在三维空间直角坐标系中,捕虫网的初始位置是 ,而萤火虫与捕虫网的初始距离为 。
捕虫网受你的控制而移动,而与此同时,萤火虫也总是朝着远离捕虫网的方向移动,此过程使用 1000 步的近似连续过程来模拟。
你的目标是,在萤火虫逃出 的范围之前,抓住萤火虫。
捕虫网与萤火虫的速度之比为 ;抓住萤火虫的判定标准为:捕虫网与萤火虫的距离不大于 。
每回合输入你希望捕虫网移动到的位置 ,其中 为浮点数,表示捕虫网移动的目标位置。
解析
本题有两种解题思路。一种是逐步试探,不断逼近萤火虫;一种是用小步位移先求解萤火虫的位置,再直接追至目标位置。两种方法都是可以的,不过要走多周目的话,还是建议求出解析解。
试探法
在这道题中,你只知道萤火虫的距离,而不知道具体的方向,这是很麻烦的。那么,有没有什么方法可以确定这个方向呢?当然有。
试想,如果你向某个方向前进了 距离,而萤火虫与你的距离增加了 ,这说明什么?
只有一种情况:萤火虫和你的前进方向完全相反。
再试想,如果你向某个方向前进了 距离,而萤火虫与你的距离减少了 ,这说明什么?当然是萤火虫和你的前进方向完全相同。
我们再来考虑更一般的情况,即,当你向某个方向前进 时,萤火虫与你的距离变化了 。
如果 ,这就说明我们正在南辕北辙,方向不对;如果 ,这就说明我们的方向确实是朝着靠近萤火虫的那一侧。 越大,就说明我们的方向越接近于真实的方向。就这样,我们可以一边调整,一边试探,不断逼近萤火虫,从而把距离缩减到 以内。
解析法
在此之前,我们只是根据 的大小来粗略判断「我们距离萤火虫多远」。但其实,我们更希望充分利用这份信息,判断出萤火虫的具体方向。
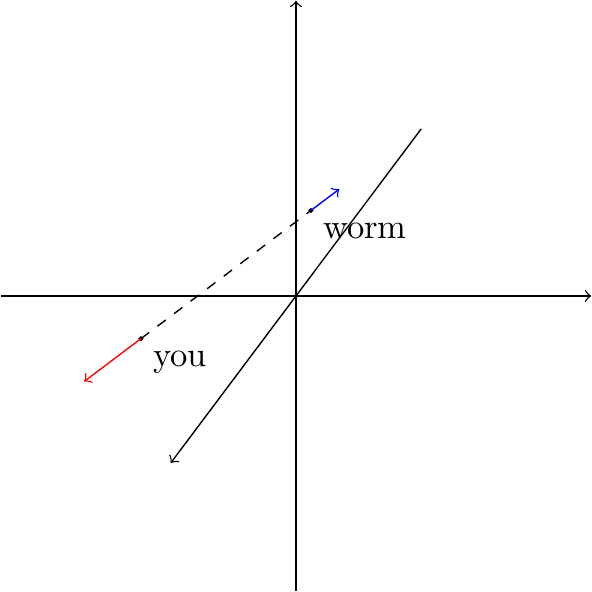
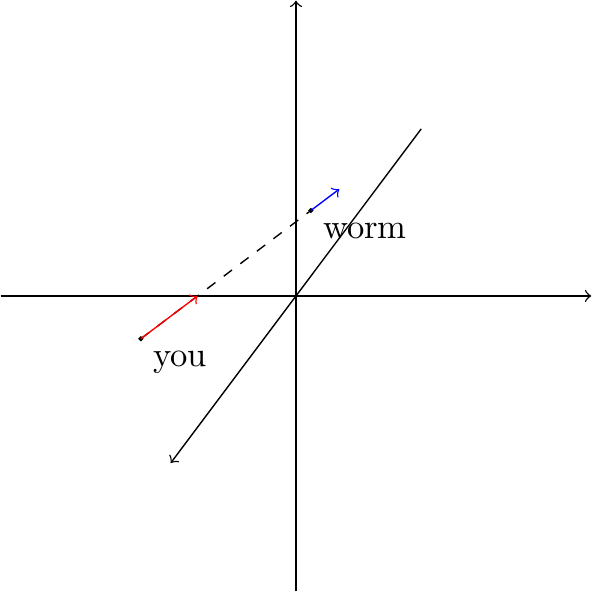
假设我们朝某个方向(设方向向量为 )从点 移动到点 ,而萤火虫从点 移动到点 。我们可以证明 一定在 三点确定的平面内(因为萤火虫运动的方向向量一定平行于此平面)。
那么我们首先在这个平面内思考萤火虫的运动过程(在三维空间里描述起来还是太麻烦了点):
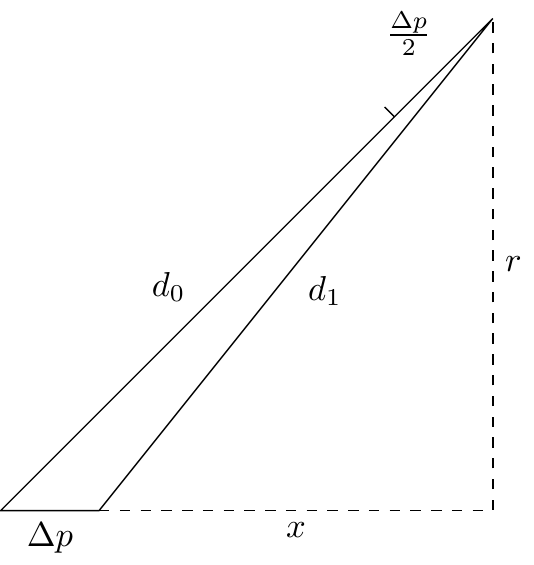
在该图中,萤火虫的行动路线是个曲线;但只要 足够小,我们就可以把它近似地当作是直线。
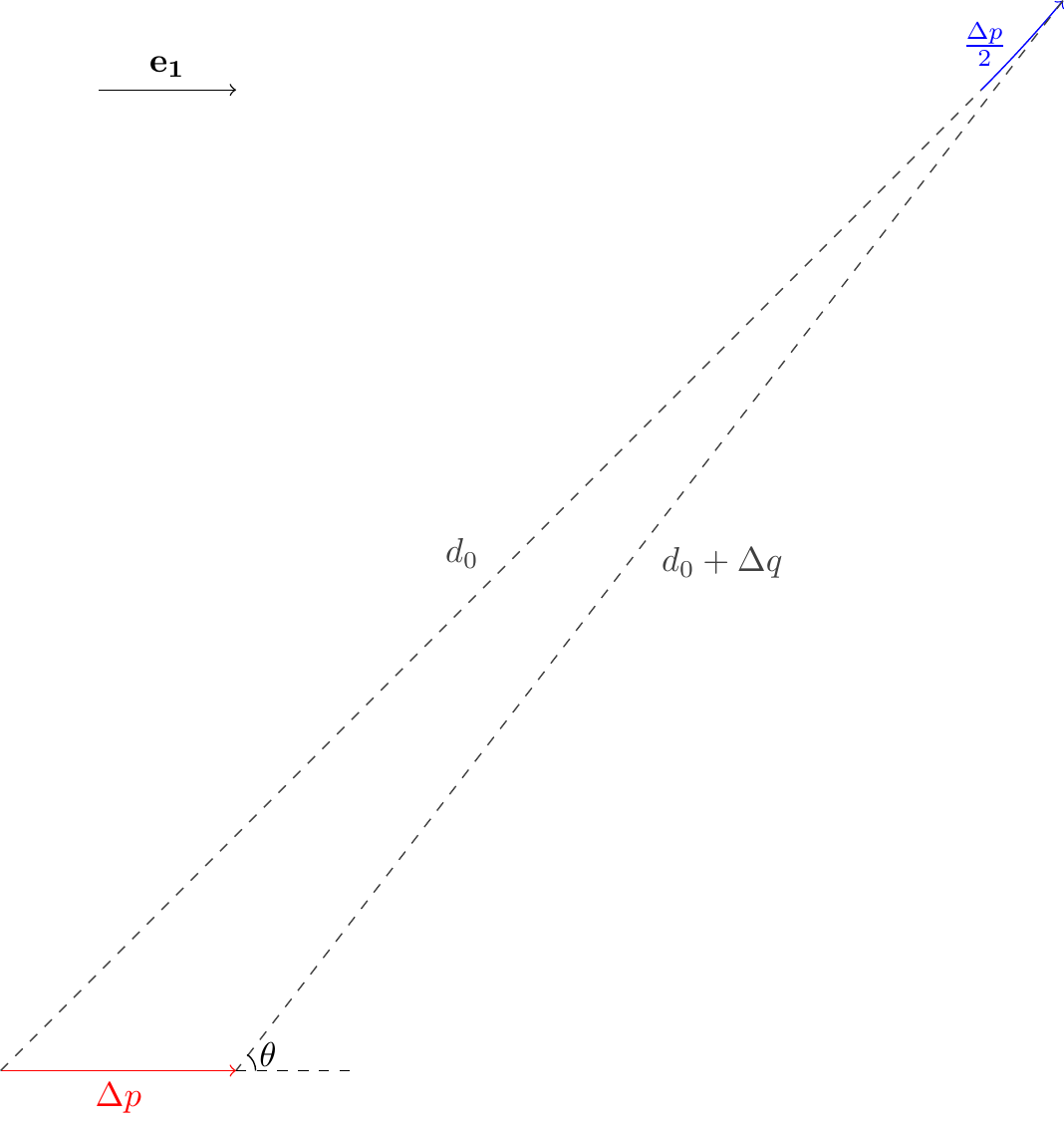
这样一来, 将会构成一个三角形,而这个外角 ,正是我们期望得知的「方向角」。
如何求出 呢?我们可以使用余弦定理:
整理一下这个式子,就可以得到
现在我们知道了方向和距离,那么就能在平面上确定两个点(因为我们尚不知晓 的正负),这两个点就是萤火虫可能位置的近似解。
然而,在三维空间中我们无法根据现有的信息判断「这个平面在哪」,因此我们得到的结果只能说明萤火虫可能的位置在一个圆环上。
接下来我们再选择一个与 线性无关的方向向量 ,重复以上工作,得到另一组解。两个圆至多只有两个交点,这是一个巨大的进展。
接下来我们再选择一个与 线性无关的方向向量 ,重复以上工作,得到另一组解。三个圆至多只有一个交点,这就是我们需要的解!
以上只是对可行性的阐述;而实际上我们没必要真的在空间中求三个圆的交点。我选择的方案是:投影。
我们通过在 方向上的运动能够得到一组解,那是一个圆环。我们不能确定萤火虫在圆环上的哪个位置;但有一件事是确定的,那就是它的位置在 方向上的投影。
举个例子,如果我们向 轴正方向移动了 ,据此求出的角度是 ,那岂不就是说,萤火虫的位置在 轴的投影就是 吗?
同样的道理,如果我们再分别向 轴和 轴移动一小段距离的话,我们也可以求出萤火虫位置在 轴和 轴上的投影。这样一来,**我们就完全求出了萤火虫的位置!**那么接下来的问题就迎刃而解了!
误差分析
现在我们来做一点误差分析。
本题的要求比较松,只要距离在 以内都可以判定为通关,所以我们对计算误差的可接受范围就是 。
哪些地方产生了误差呢?
首先是,我们假设当 很小时,萤火虫的运动近似于直线。
曲线运动带来的误差是很难估计的,但我们可以为它估计一个上界。
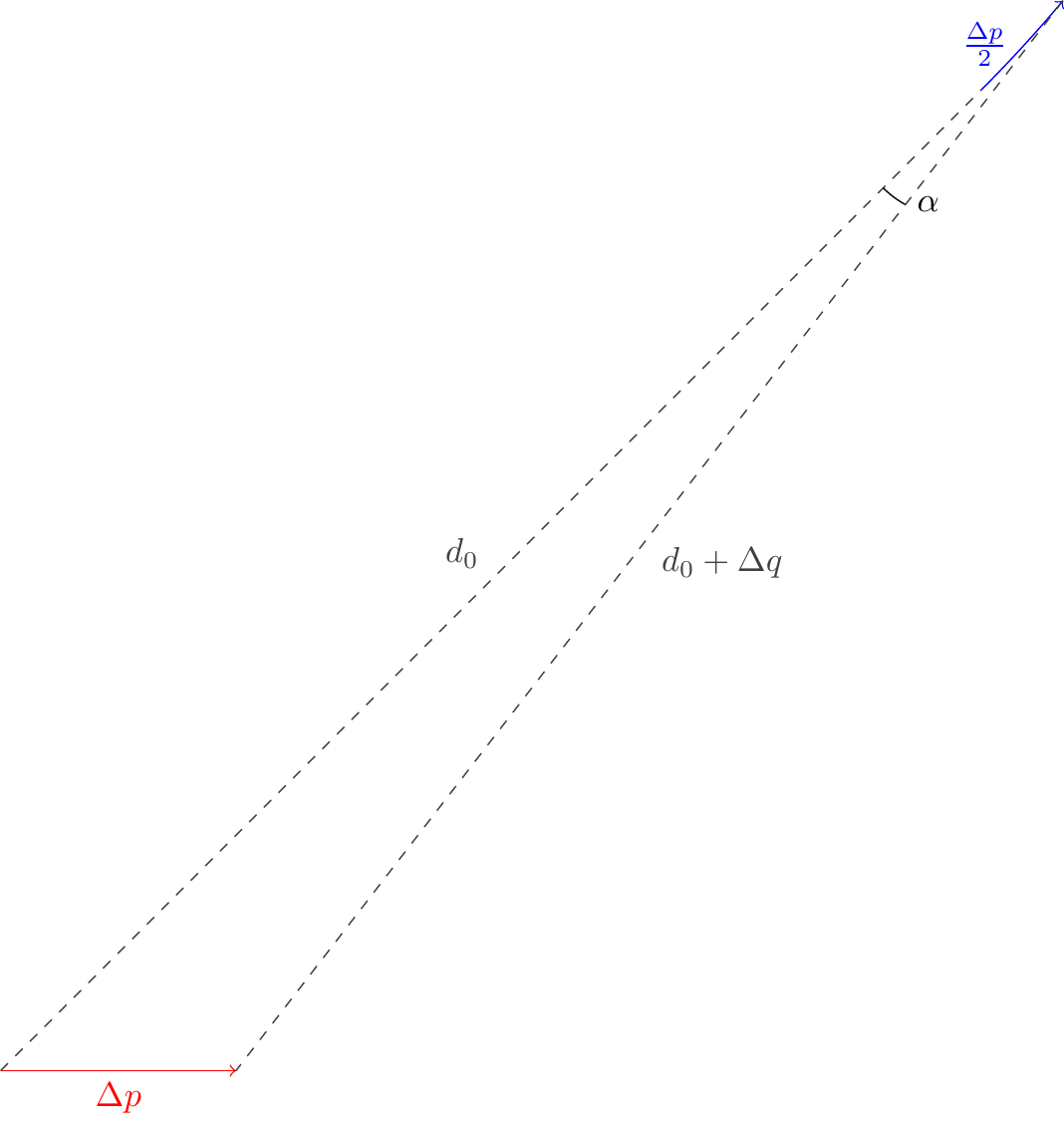
萤火虫偏转的角度约等于此图中的 。而当 足够小的时候,我们可以粗略认为 。
而萤火虫走过的距离为 ,它的位置误差不会超过半径为 ,弧度为 的扇形区域,也就是 。
假如说我取 ,那么这个误差大概会到达 量级,可以说是完全没有影响了。
另一个误差来源在于:我们分别测定 坐标时必然存在次序;当我们测定其中一个值时,必须要让萤火虫运动起来,那么我们先前测定好的值就不准确了。
假设我们的测定顺序是 ,而我们每次都移动 距离,那么 轴上的误差积累了两回合,也就是不超过 ; 轴上的误差积累了一回合,不超过 ;而 轴上,我们姑且认为没有误差。
所以累积误差是多少呢?不超过 。所以只要 取得较小,我们就可以尽量避免出现很大的误差。
不过,也不是说 就要取得越小越好。本题的浮点数精度只有七位有效数字,换句话说,即便是 在数值上有 的差异,经过四舍五入之后都有可能放大到 大小。如果你用 量级的 来测定结果的话,那么这个结果的准确度反而要大打折扣了。
示例代码
下面的 Python 代码是我测题时使用的,可供参考:
import sys
rate=.5
delta=.001
d0=float(sys.argv[1])#初始状态下的距离
d1=float(sys.argv[2])#向x轴方向移动delta后的距离
d2=float(sys.argv[3])#向y轴方向移动delta后的距离
d3=float(sys.argv[4])#向z轴方向移动delta后的距离
dx=d3*((d0+rate*delta)**2-delta**2-d1**2)/(2*delta*d1)#相对距离在x方向上的投影
dy=d3*((d1+rate*delta)**2-delta**2-d2**2)/(2*delta*d2)#相对距离在y方向上的投影
dz=d3*((d2+rate*delta)**2-delta**2-d3**2)/(2*delta*d3)#相对距离在z方向上的投影
x=2*dx+delta
y=2*dy+delta
z=2*dz+delta
print(f'{x} {y} {z}')#前往此处即可抓到萤火虫
算法简化
脉冲星为我提供了一个更简单的思路,如图所示:
在这里,我们根本没必要求出哪个具体的角度,只需要在两个直角三角形中根据勾股定理列出如下方程组:
便可以解出 。这就是萤火虫与你在 轴上的相对距离。
另外两步也可以如法解出,它的思路比使用余弦定理更简洁,但没有本质上的区别。